On Thursday (23/07) and Friday (24/07) of last week the UNEXUP consortium met online for the First Progress Meeting, supposed to happen in person, in Porto (Portugal), but due to the COVID-19 situation it had to be held online. On Thursday the work package leaders presented their current work and next steps for 2020 and after; while on Friday there were further discussions and plan of actions for the future.
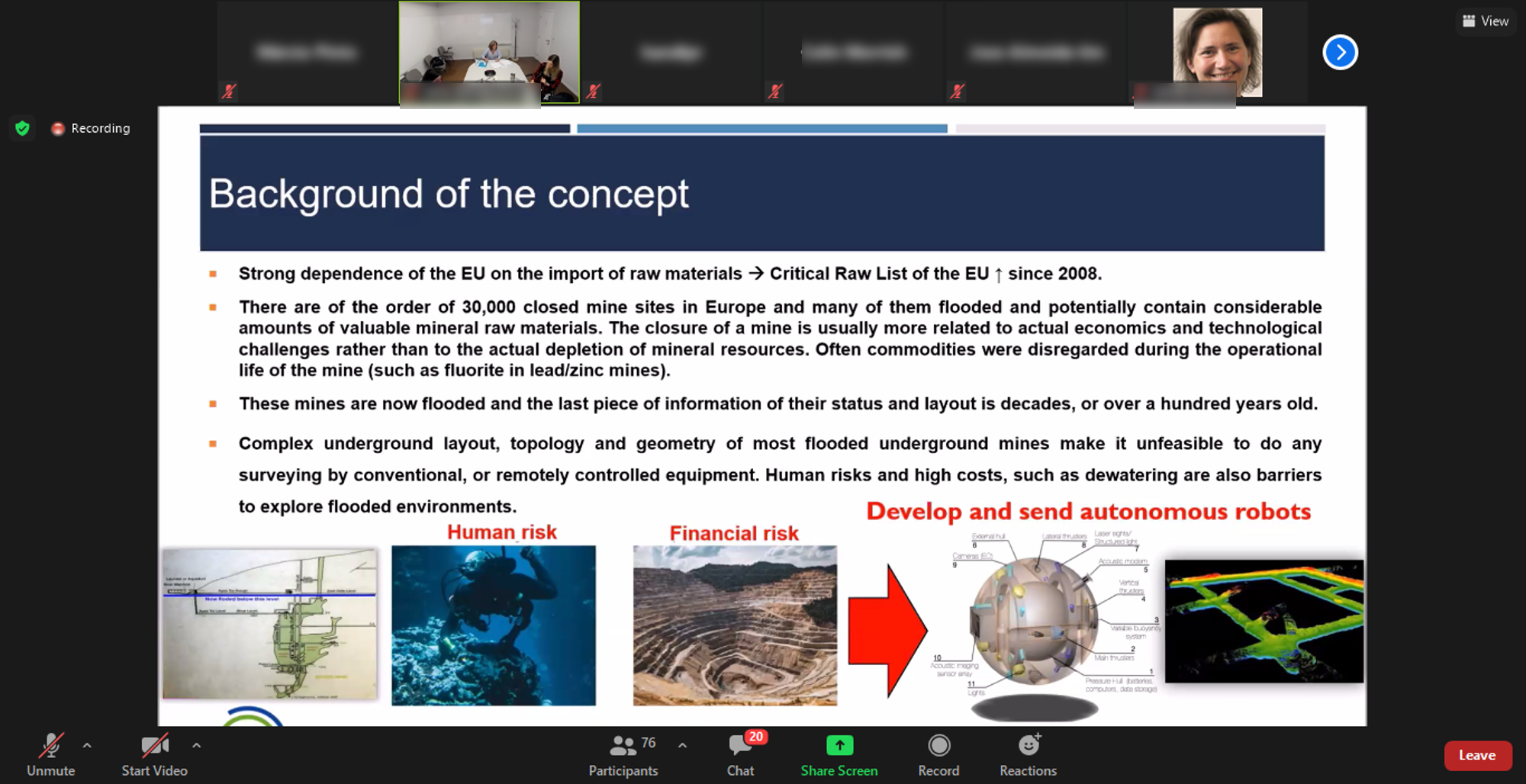
The first day started with a presentation from the Project Coordinator Norbert Zajzon (WP3), which covered overall information about UNEXUP, the current state of the project, as well as future plans. After that, the other Work Package leaders – WP0, WP1, WP2 and WP4 – discussed about their current status:
Work Package 0: Market strategy and business development portfolio
UGR (UNEXMIN GeoRobotics Ltd.) presented the current state of the Go-to-Market strategy and business plan for the UNEXUP technology. Discussions on the branding, future services, test markets, competitors and marketing tools provided a broad understanding of how the commercialization of the underwater exploration service will be provided to the future clients of the company.
Work Package 1: Technology upscaling and development
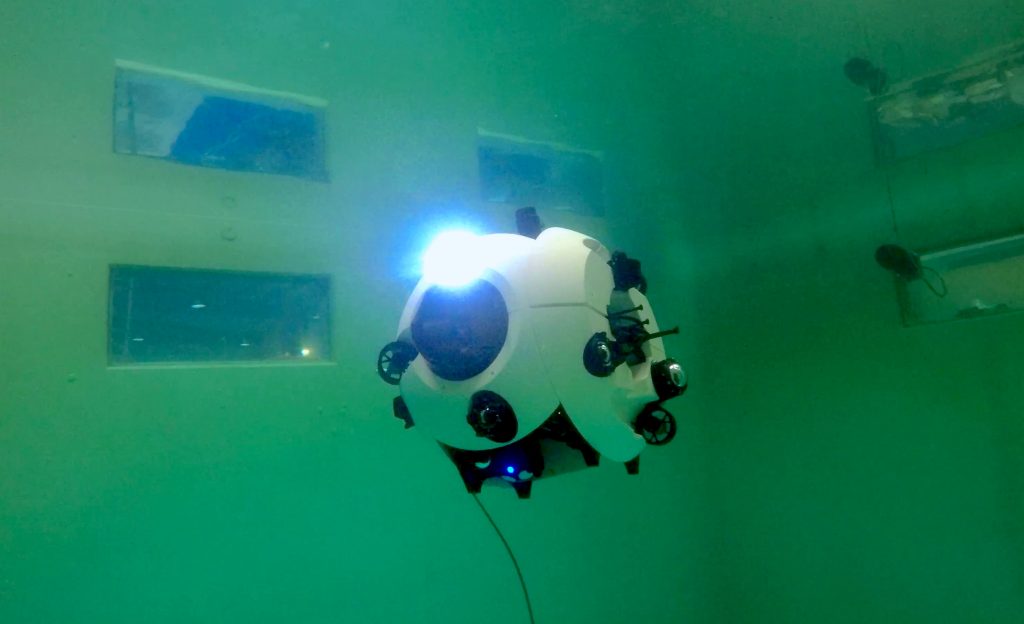
The INESC TEC team, together with TAU (Tampere University), UNIM (University of Miskolc), UPM (Universidad Politécnica de Madrid) and RCI 4dcoders, presented the current state of the robotic technology and instrumentation. INESC TEC talked about the navigational instrumentation, autonomy, testing of components under environmental extremes, as well as the new design of the UX-1 NEO. In addition, an introduction of some of the developments that will be implemented in UX-2, the second generation of robots within UNEXUP, was also presented.
The partners from UNIM showcased the geoscientific instruments that are being developed to extend the UX robots’ functionalities; Tampere University led discussions about the development of other tools, such as the robotic arm; the UPM team presented the current state of the software development, and the improvements in guidance and navigation; and finally, the RCI 4dcoders talked about data post-processing software, as well as solutions for the UX-1 NEO thrusters.
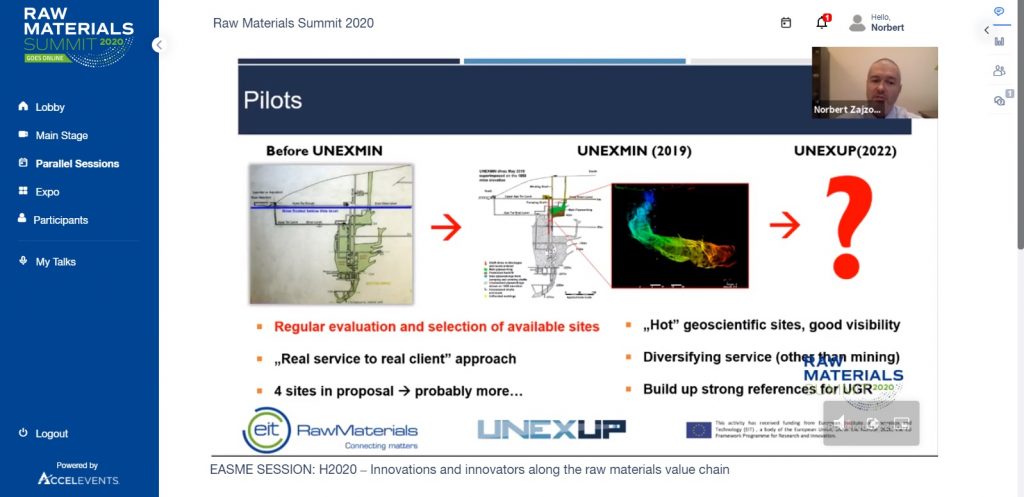
Work Package 2: Pilots
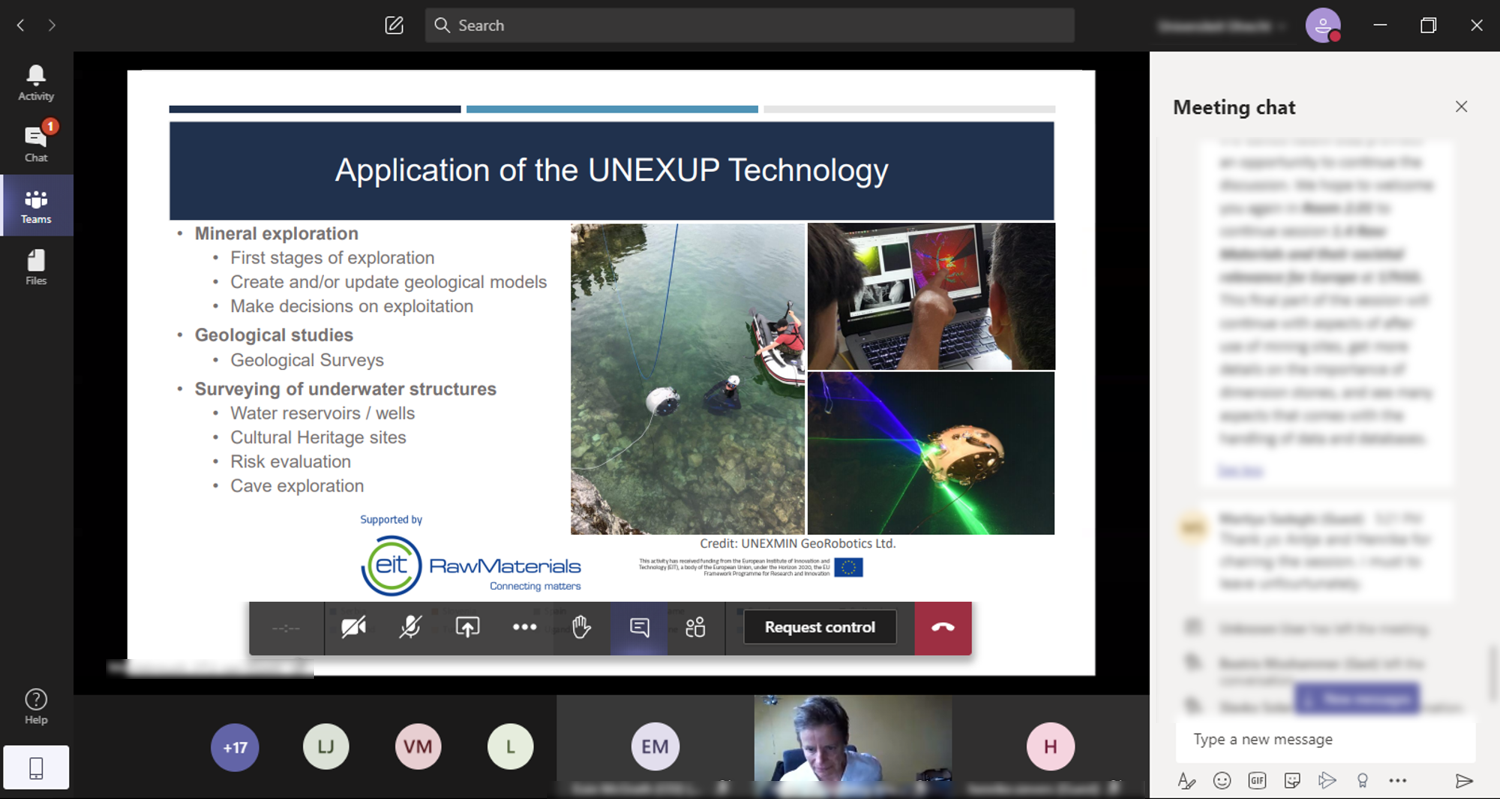
UNEXMIN GeoRobotics Ltd. is also the partner responsible for the pilots within UNEXUP. The UGR team presented the current state of the sites selection, mission planning and potential contacts that are being made in order to test the robot under real-life environments. The objective is to conduct these missions in a real service-to-client approach, and to demonstrate the UNEXUP technology capabilities under industrial conditions.
Work Package 4: Communication, dissemination and outreach
La Palma Research Centre (LPRC) is the partner responsible for the communication and dissemination of the projects’ activities. The LPRC team talked about past and current dissemination efforts and outreach material (website, social media channels, publications, events and others); as well as the dissemination plan for the next months of UNEXUP.
The second day (24/07) was dedicated to internal discussions and decision-making regarding key topics, as well as future plans for the upcoming months. The meeting started with a talk, led by RCI 4dcoders, about the sensors that will be needed for the improvements in the robotic technology, in which a “shopping list” was created for the future. After that, UGR led further discussions about the pilot selection, based on feasibility, relevance and financial criteria. The UNIM team presented some potential candidates for the pilot sites, and led the discussions about the required field equipment, risk assessment and logistics, in order to perform the pilot mission successfully and safely. The last block of discussions was dedicated to data post processing for the generation of valuable geoscientific data from the missions.
After two days of fruitful discussions and updates, the consortium is ready to start the second semester of 2020 with further developments, calibration, tests, and promotion of the UNEXUP robotic technology-
Hopefully in the near future you will be able to meet the UNEXUP consortium in person at events and conferences from the raw materials and robotics sectors.