The Kőbánya field work was performed on 14–24 June 2022, in Budapest, Hungary, with the main purpose of testing several autonomous capabilities of UX-1Neo.
The mission was done in the largest underwater part of the partially flooded Kőbánya-mine, which dry parts were/are utilized for multiple purposes, mainly as cellars.
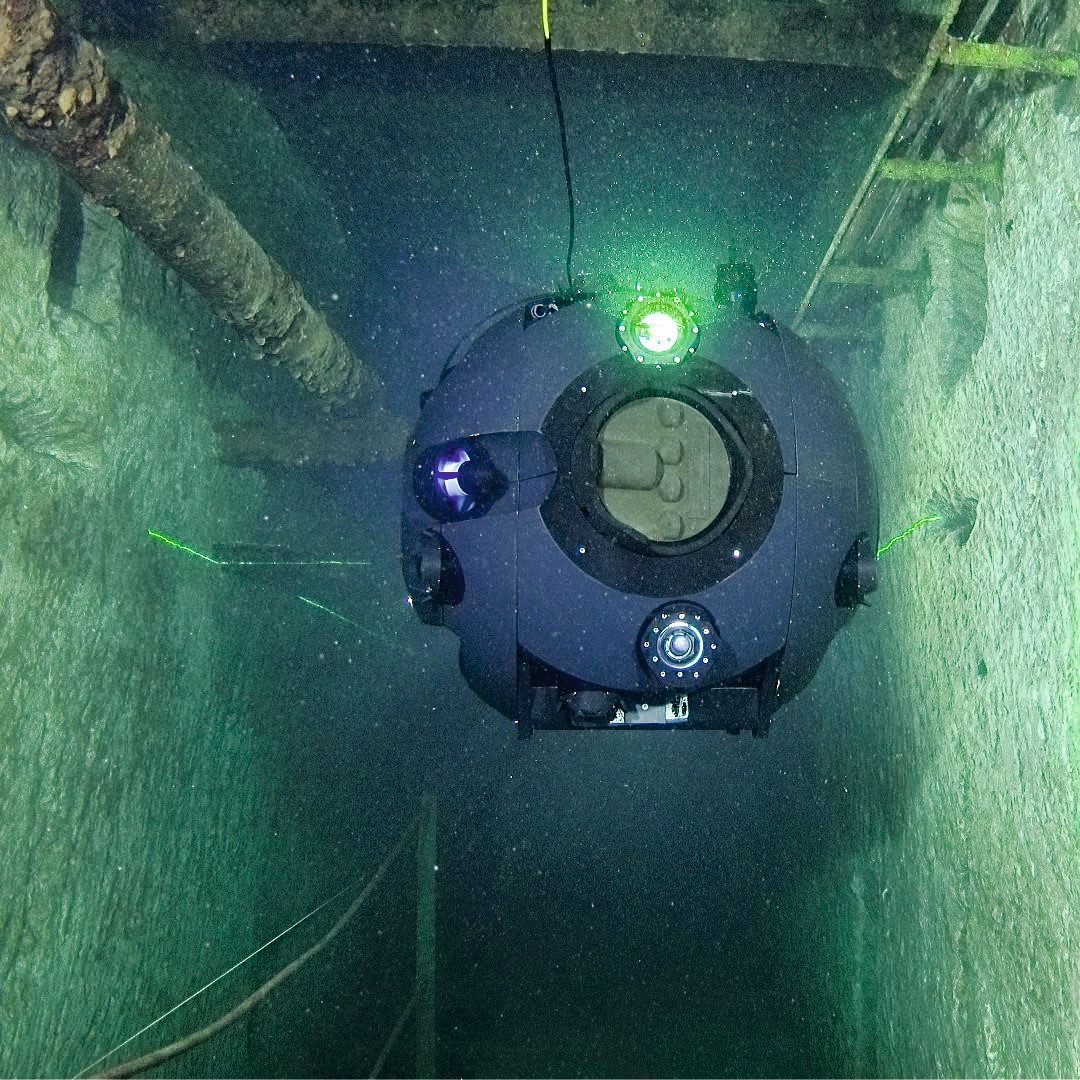
At first, UX-1Neo finished the initialization process and started to build the 3D model of the area. In the following 10 days the team tested the newly developed autonomous functions and navigational software to explore the flooded part of the cellars. The leftover items with their excessive details in the rooms and corridors provided an excellent opportunity to test the automatic mapping functions of the technology.
The highlight of this mission was the successful first completely autonomous dive, as well as the first teleoperation of UX-1Neo from the INESCTEC facilities in Porto, Portugal. As the team got confidence in the capabilities of the robot, she was sent for longer and longer missions, till the whole corridor (almost 300m) could be mapped autonomously.
It was a successful mission in which the teams of UNEXMIN Georobotics Ltd. (UGR), INESCTEC and University of Miskolc worked together in the field, testing the newest features of the UNEXUP robotic technology.
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.