Pegmatite mine, open-pit and small underground part.
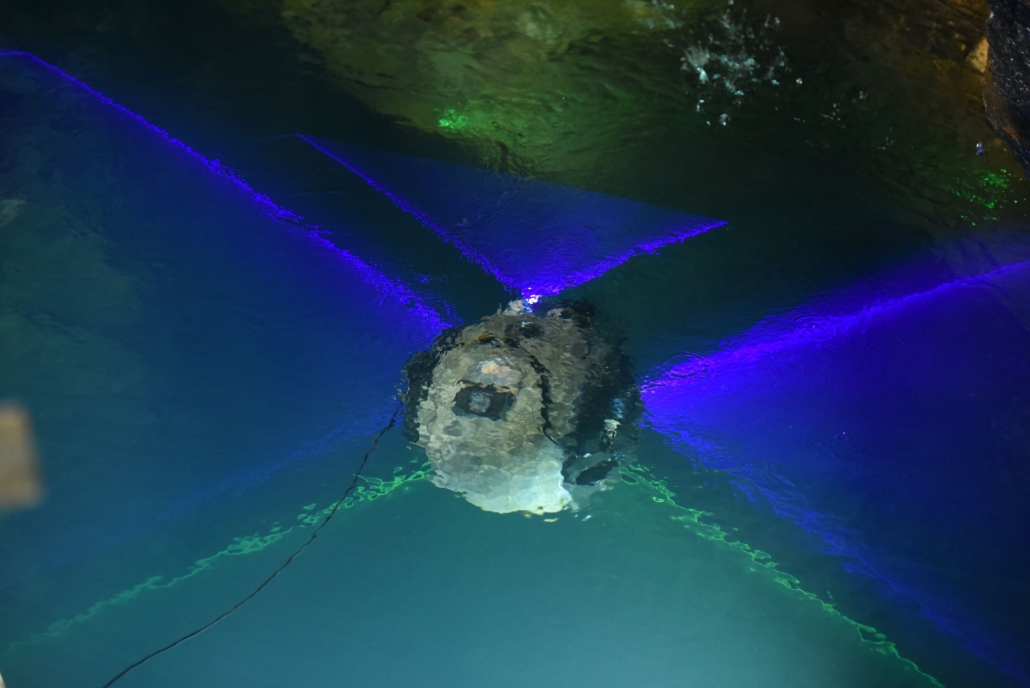
UX-1 was successfully tested in a real life environment
Two test sites: shallow part, and deep part of the quarry
Navigational and ballast systems were tested and worked well
Depth control system tested and proved to be working
2-hour long dives approximately
Maximum depth of about 30 meters
Successful mapping of old underground drive
MSU camera and LED synchronisation were successfully tested outside the water*
*not tested on any dive, one of the control board was broken by accident